1. TM(Transfer Module)의 정의와 구성
LL(Load Lock)을 거쳐 진공 상태로 들어온 웨이퍼는 TM(Transfer Module)에 도달한다. TM은 LL에서 웨이퍼를 받아 공정 챔버(PM)로 이송하고, 공정이 끝난 웨이퍼를 다시 LL로 내보내는 진공 로봇이 위치한 공간이다.

TM은 육각형 혹은 다각형 형태의 플랫폼으로 구성되며, 주요 부품은 다음과 같다.
- Robot & End Effector: 진공 환경에서 웨이퍼를 집어 나르는 로봇 팔과 손.
- Slot Valve: 각 챔버(LL, PM)와 TM을 격리하는 밸브.
- Top Lid: 유지 보수 시 개방하는 상부 덮개.
- View Port: 내부 로봇의 움직임을 육안으로 확인하기 위한 투명 창.
- Pumping & Venting System: 진공 및 대기압 형성을 위한 배관 시스템.
2. TM의 진공 제어와 압력 위계 (Pressure Hierarchy)
TM은 기본적으로 고진공 상태를 유지하지만, 유지보수(PM work) 시에는 대기압(ATM)으로 전환해야 하므로 Pumping과 Venting 라인이 모두 존재한다.

여기서 중요한 것은 각 모듈 간의 압력 차이(Differential Pressure) 설정이다. 오염 방지를 위해 다음과 같은 압력 위계를 따른다.
P_LL < P_TM < P_PM
- P_LL (Load Lock 압력), P_TM (Transfer Module 압력), P_PM (Process Module 압력)
- 핵심 로직: 실제 공정이 진행되는 PM에서는 유해 가스나 Byproduct(부산물)가 많이 생성된다. 따라서 PM의 압력이 TM보다 높으면 오염 물질이 TM으로 역류할 수 있다. 이를 방지하기 위해 P_TM > P_PM 상태를 유지하여 기류가 항상 청정 구역에서 오염 구역으로 흐르도록 설계한다.
3. AWC (Auto Wafer Centering) 시스템
진공 로봇이 웨이퍼를 고속으로 이송하다 보면 관성이나 마찰로 인해 웨이퍼 위치가 미세하게 틀어지는 Slip 현상이 발생할 수 있다. AWC는 이러한 위치 오차를 감지하고 로봇이 자동으로 좌표를 보정하여 PM에 정확히 안착시키는 기능이다.

(1) 구성 요소 및 센싱 원리
- 구조: 챔버 입구 게이트 쪽에 Light Sensor(발광부/수광부)가 설치되어 있다. 진공 차단을 위해 센서 외부는 Al(알루미늄) 하우징으로, 빛이 통과하는 부분은 Quartz(석영)와 O-ring으로 밀봉 처리된다.
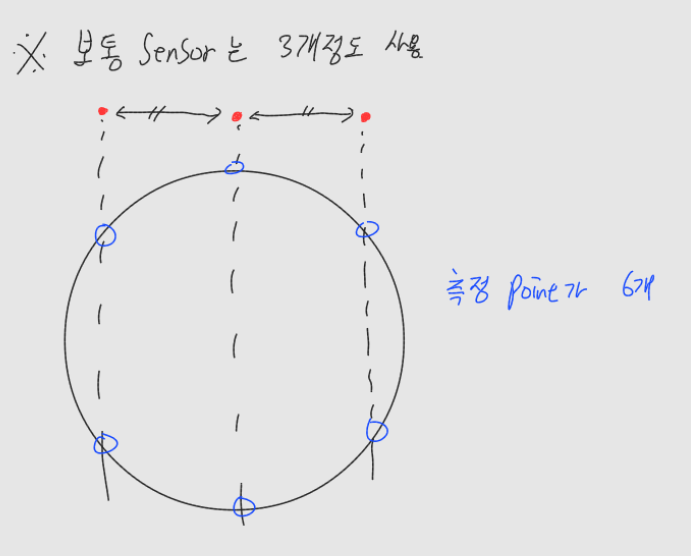
- 원리: 로봇이 웨이퍼를 들고 센서를 통과할 때, 빛이 차단되는 시간을 측정한다. 보통 3개 이상의 센서를 사용하여 웨이퍼의 엣지(Edge) 좌표를 산출한다.
(2) Slip 감지 알고리즘
노트의 그래프를 통해 정상(Normal)과 비정상(Abnormal) 케이스를 구분할 수 있다.
- R 방향(직진 방향) Slip: 웨이퍼가 로봇 팔 안쪽이나 바깥쪽으로 밀린 경우. 센서를 통과하는 타이밍이 예상보다 빠르거나 늦게 측정된다.
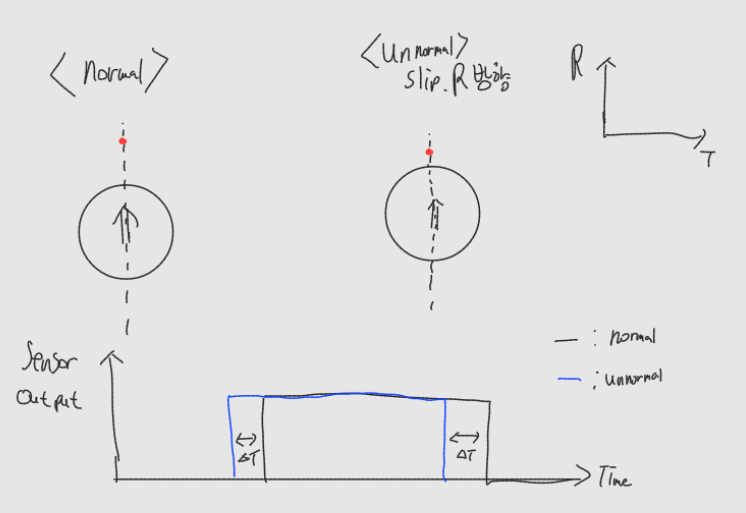
- T 방향(회전 방향) Slip: 웨이퍼가 좌우로 치우친 경우. 좌우 센서 간의 신호 검출 시간차가 허용 범위를 벗어난다.

- 센서는 총 6개의 포인트를 측정하여 웨이퍼의 중심을 계산하고, 오차만큼 로봇의 모션 프로파일을 수정하여 공정 챔버에 진입한다.
반응형
'Semiconductor (외부 교육)' 카테고리의 다른 글
| [렛유인 KDC 교육] 반도체 장비 6일차 : 배관 연결의 기술 (Fitting, Flange, Welding) (0) | 2026.02.14 |
|---|---|
| [렛유인 KDC 교육] 반도체 장비 5일차 : 유틸리티(Utility)와 배관 설계 (Tube vs Pipe) (0) | 2026.01.29 |
| [렛유인 KDC 교육] 반도체 장비 4일차 : PM(Process Module)의 핵심 부품과 진공 계측 (0) | 2026.01.13 |
| [렛유인 KDC 교육] 반도체 장비 2일차 : 진공 제어와 Load Lock(LL) 메커니즘 (0) | 2026.01.12 |
| [렛유인 KDC 교육] 반도체 장비 1일차 : 수율을 지키는 첫 관문, EFEM과 장비 플랫폼 트렌드 (1) | 2026.01.05 |



